1.GNSS/INS组合导航算法
a.核心技术:
GNSS/INS组合导航可以利用GNSS和INS之间的互补特性产生比任何一个独立工作的分系统更可靠的导航系统。Kalman滤波是GNSS信息和INS信息组合时最常用的数据融合算法,可以根据各系统的信息质量有效地将其组合。反向平滑(如RTS平滑)可以在后处理模式下解决INS独立工作时导航发散问题。其他信息辅助(或者运动约束)可以保证GNSS弱信号或者GNSS信号失锁情况下的导航精度。经过技术沉淀和积累,形成了一套成熟且完善的GNSS/INS组合导航核心算法,为GNSS/INS组合导航相关技术研究提供了理论基础平台。图1为GNSS/INS组合导航核心算法框架图。
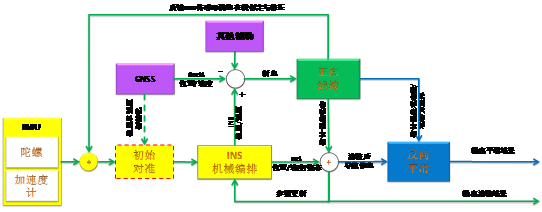
图 1 GNSS/INS组合导航核心算法框架图
b.产品介绍:
基于上述核心技术,自主研发了一套GNSS/INS组合导航数据处理软件, 满足定位定姿的高精度和高可靠性要求,其具体功能:
• 采用扩展卡尔曼滤波(EKF)进行多信息数据融合;
• 采用RTS反向平滑进一步提高精度;
• 支持INS独立解算;
• 支持里程计信息、非完整性约束等多信息辅助,保障在GNSS信号比较差或者失锁的情况下的定位定姿精度;
• 支持典型的IMU(包括导航级、战术级和MEMS等)精度指标参数自动设定;
• 具有零速修正设定功能,可人工设置零速修正时间段,提高精度;
• 具有GNSS中断仿真功能,可人工设置无GNSS信息辅助;
• 具有多种初始对准模式,用户可根据自身测试条件适当地进行初始对准;
• 具有数据自动扫描判断数据长度功能;
c.应用案例:
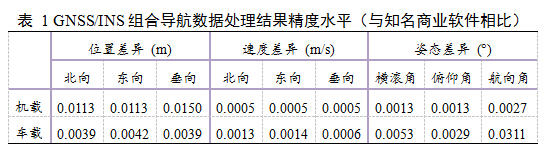
该核心技术已用于车载、机载等不同测试环境下的GNSS/INS组合导航数据处理,其数据处理精度已达到国际知名商业软件水平。
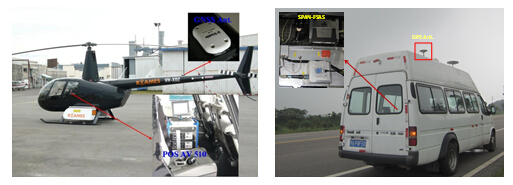
图 2 机载(左)和车载(右)应用
d.联系方式:
联系人:张全
邮箱:quanzhang@whu.edu.cn
电话:15071471878
2.POS系统
a.核心技术:
定位定姿系统(Positioning and Orientation System,POS)本质上是GNSS/INS组合导航硬件系统加上一套精密数据处理软件(用于对原始数据进行事后处理,进一步提高定位定姿精度)。除去GNSS/INS组合导航核心算法,POS硬件部分中的GNSS和IMU高精度时间同步和杆臂补偿等,也是保证POS系统达到厘米级甚至毫米级定位精度的关键技术。
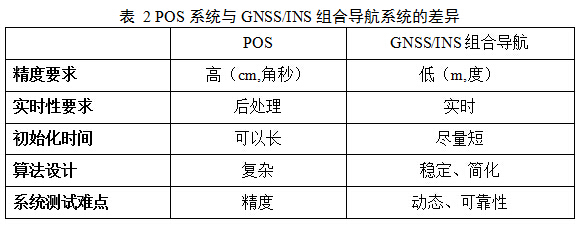
相比于GNSS/INS组合导航系统,POS系统要求的定位定姿精度高,但对实时性没有严格的要求。因此,其数据处理算法需要并允许设计得更为复杂,对POS产品的性能测试(精度测试)也相应的比较复杂。下表给出了POS系统与普通的GNSS/INS组合导航系统的主要差别。
b.产品介绍:
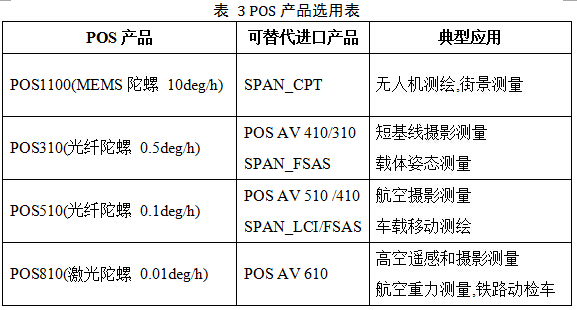
与武汉迈普时空导航科技有限公司合作研制了不同等级的POS硬件系统。

图 3 不同等级POS硬件系统
c.应用案例:
(1)移动测图应用
POS系统为移动测图系统(Mobile Mapping System,MMS)提供直接地理参考,即位置、姿态等外方位元素。以激光雷达(Light Detection and Ranging,LiDAR)移动测图系统为例,激光点云的坐标精度主要依赖POS提供的位置和姿态精度。图4给出了车载移动测图系统及其点云数据处理结果。
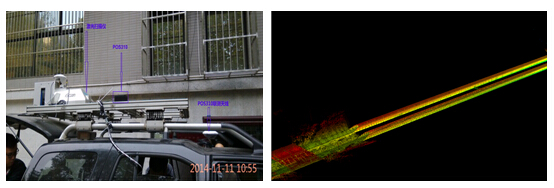
图 4 车载移动测图系统及其点云数据处理结果图(隧道)
(2)铁路轨道形变测量应用
GNSS/INS轨道形变测量系统由武汉大学研制, 是一种全新的铁路轨道测量方案,实现轨道变形快速、精准测量。图5给出了GNSS/INS轨道形变测量系统的模型图以及GNSS/INS铁轨形变测量现场作业图。
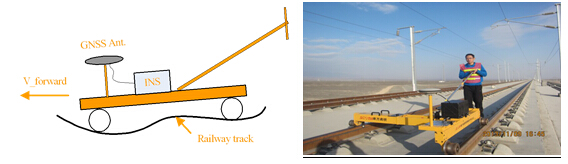
图 5 GNSS/INS轨道形变测量系统及其作业图
图6给出了30米弦高低不平顺(参考值:天宝DiNi03水准仪测得的轨面高程,精度优于0.3 mm);可见INS/GNSS实测短波不平顺与水准测量结果最大差异不超过 0.5 mm,小于1/3容许误差,因此,GNSS/INS方案能满足高铁轨道高低不平顺的检测精度要求;
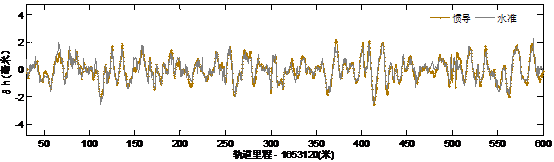
图 6 30米弦高低不平顺
d.联系方式:
联系人:张全
邮箱:quanzhang@whu.edu.cn
电话:15071471878